为什么需要Wiener Filter?
图像重构的过程中会引入噪音。一种噪音在频域与源信号是分开的,可以通过滤波将其去掉;另一种噪音和源信号混合在一起,需要通过概率的方法估计得到恢复信号。
第二种噪音的去除可以通过Wiener滤波器实现。
如下图所示滤波之后引入了噪音 g(n)=s(n)∗h(n)+v(n)
通过估计方法得到恢复信号:
s^(n)=[s(n)∗h(n)+v(n)]∗hI(n)
转化到频域:
S^δ(f)=Sδ(f)⋅Hδ(f)⋅HδI(f)+Vδ(f)⋅HδI(f)
产生的误差:
Eδ(f)=Vδ(f)⋅HδI(f)
可以看到误差 Eδ(f) 受 HδI(f) 的影响很大。也就是说,滤波后的误差V(n)会在重构的过程中被放大。所以我们不能直接用H的逆变换来恢复图像,而是改为采用Wiener Filter。简单来说Wiener Filter就是把 HδI(f) 进行改造,从而减小误差的影响。

a)滤波 b)恢复
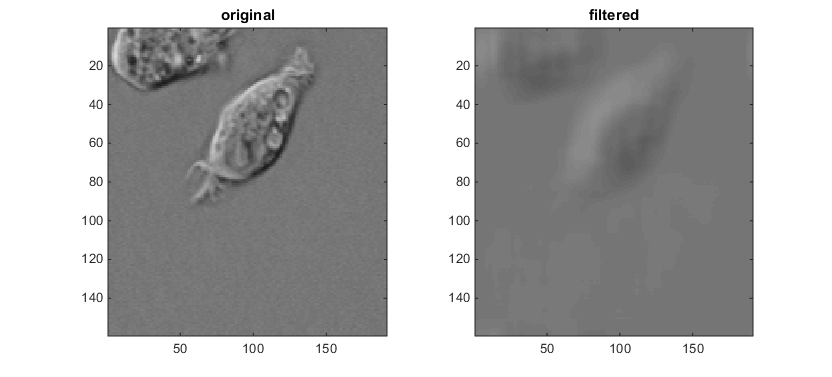
原图和通过低通滤波器的图像对比
如何得到Wiener Filter
下面介绍Wiener Filter的原理(即如何找到新的 HδI(f)):
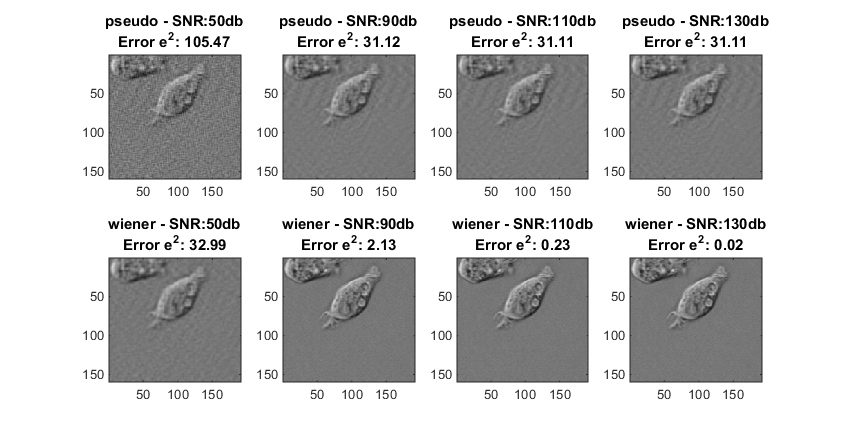
Inverse Filter与Wiener Fileter在不同程度的噪音下恢复得到的图像